 The Bristol Robotics Laboratory held a competition in June 2021 focusing on the evaluation of SWARM AI algorithms in robotics and how they could be used to overcome challenges in logistics requiring flexible robotic solutions.
The Bristol Robotics Laboratory held a competition in June 2021 focusing on the evaluation of SWARM AI algorithms in robotics and how they could be used to overcome challenges in logistics requiring flexible robotic solutions.
The scenario
An increase in the number of emergency food parcels distributed by food banks accelerated over the course of the Coronavirus pandemic, particularly in those going to children. Robot swarms could help streamline the distribution of emergency food parcels, while freeing up time for volunteers and workers to interface with the users and provide human contact.
The hope is that swarms could be used out-of-the-box to power organisation and transport needs and also used to organise the stock room of a small retail shop or retrieve boxes in a pop-up distribution centre for school lunches.
The competition
The DOTS competition was run jointly by the Bristol Robotics Laboratory, Toshiba Bristol Research and Innovation Laboratory and the South Gloucestershire Council’s UMBRELLA project. The robots used were called DOTS (Distributed Organisation and Transport Systems) and they fitted the problem at hand: they didn’t rely on maps or any complex infrastructure, therefore making them both versatile and adaptable.
Sabine Hauert, Associate Professor of Swarm Engineering and lead of the DOTS competition said, “After years of research in swarm algorithms and hardware, we were at the stage where we could think of real-world applications. Robot swarms made so much sense as out-of-the-box solutions that could scale and adapt to a variety of messy real-world environments”.
The Robots
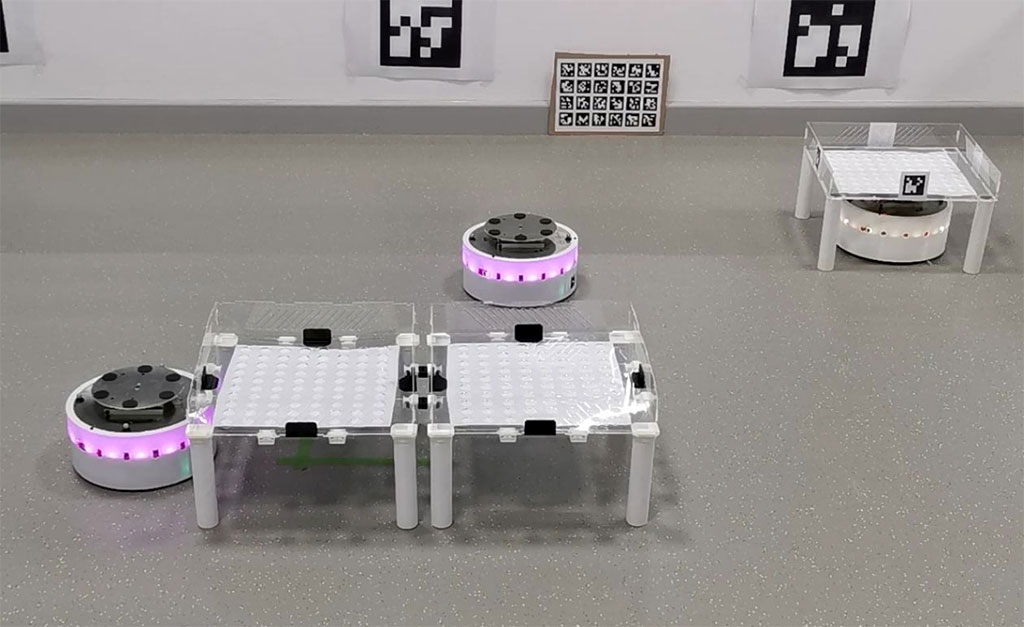
The DOTS were custom-built 25cm robots, that moved fast, had long battery life (8 hours), could communicate through 5G, WiFI, and bluetooth, house a GPU, and sense the environment locally, as well as lift and transport payloads (2kg per robot). They were housed in the new Industrial Swarm Arena at the Bristol Robotics Laboratory, that’s accessible remotely and 5G enabled.
“It’s took three years to design and build the DOTS robots and simulator. I wanted the DOTS to individually be quite capable, with the latest sensing and computational capabilities so they could make sense of the world around them using distributed situational awareness. It’s been really rewarding to see them in action, and to see that others can use them too. Many of these robots were built at my house during lockdown where I have a dedicated workshop.” said Simon Jones, Research Fellow and designer of the DOTS at University of Bristol.
The Challenge
The warehouse was a simulated 4m x 4m x 4m room in Gazebo with a 0.5m-wide strip along the right wall, that acted as the drop off zone. The 10 “carriers” that the robots needed to retrieve were scattered at random. Following the swarm robotics paradigm, each robot ran the same codebase: the challenge was therefore to engineer a solution where the emergent behaviour of the collective swarm resulted in fast retrieval.
One of the simplest solutions was for a robot to perform a random walk. As soon as a sensor detected a carrier, it homed in on the carrier and picked it up. Given enough time the robots could collectively, retrieve all the carriers. From this basic implementation, more complex behaviours could be layered, such as adding a bias for movement in a particular direction or having the robots interact to repulse or attract.
Of course, in the real-world, the robots would have to contend with obstacles as well as faults in their hardware and software. The submitted solutions were also tested for their robustness and ability to overcome these hurdles. An extra level of complexity was added with the task of retrieving carriers in a given order.
“It was a great learning experience to see the whole pipeline from code to simulation, to running with the real robots in the arena – it felt like this is where progress is made towards that vision of robots integrated into our everyday lives”, said Suet Lee, PhD Student at University of Bristol who helped support the teams.
Achievements
There were seven team submissions from around the world and it was great to see what solutions would emerge. In the end, scores were quite tight.
The winners were Swarmanauts. The team included David Garzon Ramos, Jonas Kuckling, and Miquel Kegeleirs, PhD students at IRIDIA, the artificial intelligence laboratory of the Université libre de Bruxelles, Brussels, Belgium. They were all part of the ERC DEMIURGE project team (PI Mauro Birattari) where they investigated the automatic design of collective behaviours for robot swarms.
David said, “It was exciting to participate in the DOTS competition. We enjoyed the challenge of devising and testing coordination strategies for an industry-oriented robot swarm. Next time we would like to also try automatic methods for designing the collective behaviour of the robots”.
In second place came BusyB with team members Simon Obute and Ray Lei. Ray and Simon had the following to say about their experience, “Through this competition, our knowledge of controlling and sensing for robots has been enhanced. It was exciting that our simple algorithm inspired from chemotaxis search behaviour performed well in comparison to other competing strategies. The introduction session was also helpful, because it gave us the opportunity to meet and form the BusyB team. As a team, we now look forward to the next DOTS competition and hope we can achieve more next year!”
In third place came Simple Solution by Hany Hamed and their feisty controller.
Following steps
For a first DOTS Competition, it was great fun and we’re really happy with what was achieved by all involved. We have many ideas for the future, like how to speed up the computation, add new tasks (like organising the warehouse), and we’ll be looking to give more time to the teams to use the real hardware remotely.
Mahesh Sooriyabandara, Managing Director at the Toshiba Bristol Research and Innovation Laboratory, said “This was a great first step towards making an internet of robots and robot swarms that are useable out of the box. We’ve been working with the Bristol Robotics Laboratory for the past three years to build first the robots and then the new Industrial Swarm Arena. We’re hoping many can use this infrastructure in the future, running their code in a digital twin before transferring to the new swarm testbed”.
The DOTS Competition was supported by Simon Jones, Emma Milner, Suet Lee, James Wilson, Aswath Ganesan Indra, Sabine Hauert, and the Toshiba BRIL team.
Teams, UGA Hero Lab, Missing in Action, Str. Robot, and C5PO were also congratulated for their great submissions.
Article from:
Suet Lee (PhD Student in Swarm Security at Bristol Robotics Laboratory), Sabine Hauert (President of Robohub and Associate Professor at the Bristol Robotics Laboratory)